摘要:本文拟采用飞思卡尔半导体公司的基于Cortex-M4内核的Kinetis KV4x系列嵌入式处理器对永磁同步电机实现伺服控制,建立电机控制模型,根据系统的性能的要求和确定的控制方式,搭建系统的控制电路、相应的检测电路和保护电路,以及显示电路,采用改进的软件算法实现电机控制,注重电机伺服控制系统的联网性能,以提高电机控制的精度、响应时间。
关键词:永磁同步电机;数字式电机控制系统;Cortex-M4
Abstract:This paper adopts the Free scale Semiconductor Inc Cortex-M4 kernel Kinetis KV4x series embedded processor based on permanent magnet synchronous motor to realize servo control, motor control system according to the established model, the performance requirements and determine the control mode, set up the system control circuit, the detection circuit and the protection circuit, and display circuit, the software algorithm is improved implementation of motor control, focusing on network performance of motor servo control system, in order to improve the motor control precision and response time.
Key words: permanent magnet synchronous motor; digital motor control system; Cortex-M4
1、引言
近年来随着微处理器技术和数字信号处理技术(DSP)的飞速发展,推动了数字式电机伺服控制系统不断发展,使得永磁同步电机控制系统的直流调速性能有着较大的提高。国外各大半导体厂商已经推出了许多完善的控制方案,而我国目前的永磁同步电机控制技术和国外存在较大的差距,并且大部分依赖国外产品。为了解决这一问题,本文提出了一种基于ARM Cortex-M4系列的MKV46F256VLH16处理器的永磁同步电机的调速控制系统,以实现高精度电机伺服控制系统的研究,用于电机高档控制精度领域。
2、Cortex-M4内核处理器
本控制系统采用基于ARM Cortex-M4系列的MKV46F256VLH16处理器,是属于飞思卡尔半导体公司的Kinetis KV4x系列MCU的一种高性能解决方案,能为电机和电源控制领域要求最严格的部分应用提供优异的精度、感应和控制能力。该系列MCU采用运行主频为150 MHz、带DSP和浮点运算单元的ARM Cortex-M4内核,配备转换时间为240 ns的两个模数转换器(ADC),分辨率为312ps的eFlexPWM模块及NanoEdge支持,多达30个PWM通道,支持多电机系统和双FlexCAN模块。因此Kinetis KV4x系列MCU可以实现高动态响应的永磁同步电机无传感器矢量控制算法。当10 kHz PWM频率时的CPU负荷仅占24%,因而有很大的余量来提高快速控制环的频率或执行用户的其他任务。而基于Cortex-M4内核的ARM处理器作为新型嵌入式控制器在解决电机伺服控制领域还未大规模展开。
3、系统整体结构
3.1 永磁同步电机伺服控制系统组成
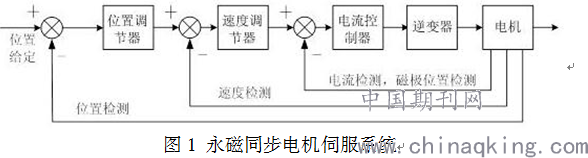
如图1为永磁同步电机的系统结构图。该系统是一个典型的三环控制系统,由位置环、速度环和电流环组成。位置控制器是通过外部的脉冲给定,给定和通过永磁电机的编码器反馈位置信息进行位置环的PID来完成对速度环的给定。速度控制器是为了增加系统的抗扰动能力,即调节速度的波动,为电流环给定。速度控制器的反馈也来自编码器。电流控制器的作用是:实现快速的动态响应性能,使电流在动态响应中不出现超调现象。
3.2 控制系统硬件设计
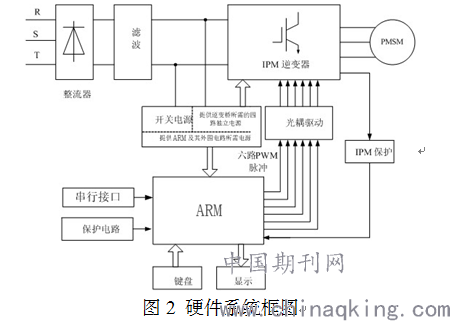
本控制系统的硬件结构如图2所示,以ARM公司Cortex-M4系列的MKV46F256VLH1为核心,实现调速、电流控制、电机网络接口电路、AD信号采集和人机交互等功能。
1.2.1 电源控制部分
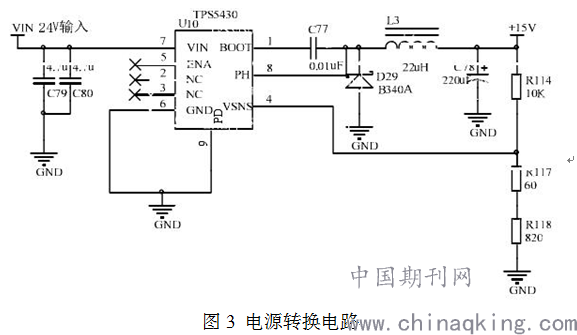
电源部分采用24V单独供电输入,弱电部分主要是降压电路,供电对象为控制芯片(3.3V)、IPM电路(5V、15V)、运放电路及信号调理电路(5V)及串口隔离芯片(5V)。电源芯片采用开关电源TPS5430,通过厂家给出的电阻电压转换公式调整关系式中的电阻比例关系可得到所需电压,如图3所示。
1.2.2 电流、电压采样电路
本控制系统所需的定子电流和,转子的母线电压、相电压和相电流等参数,电压采集通过电阻分压方式,电流采集采用三电阻电流采样电路,经OPA4350放大,送至控制器的模数转换接口。
1.2.3 PWM隔离电路
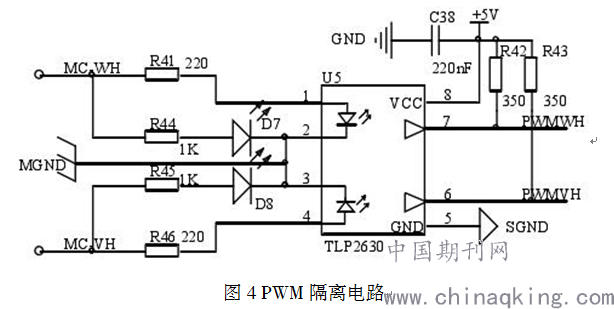
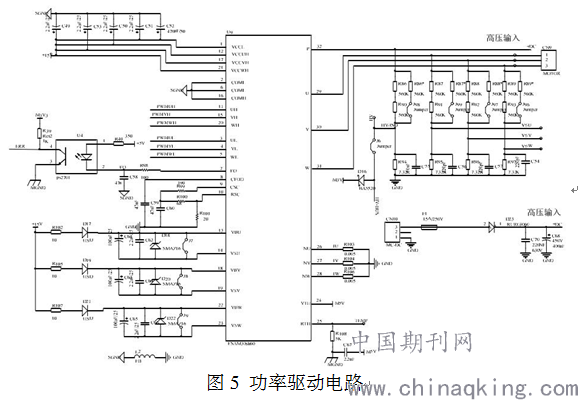
本系统在由微控制器输出的6路PWM波形输出端和IPM间加上路光耦隔离电路,进行强弱电隔离,为了减小微控制功耗,在光耦隔离器的输入端口加上220欧的限流电阻。如图5所示。
1.2.4 串口通信电路
本控制系统采用RS232芯片进行通信,使用时要进行电平逻辑转换,同时考虑到驱动板和上位机主板电平差异,必须对串口信号进行隔离。ADM3251是一款能够隔离高达2.5KV电压的RS232芯片,可提高系统的安全性。
1.2.5 功率驱动控制电路
三相功率驱动控制电路选择的是IPM模块FSAM20SH60A,其内部具有三相桥臂功率器件、电流保护电路、驱动电路等。微控制器输出六路PWM脉冲信号控制逆变桥的关断和导通,如图5所示。
4、系统软件设计
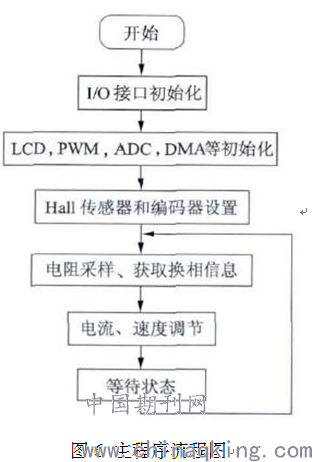
本电机伺服控制系统的程序部分由主程序、中断服务程序及显示按键程序构成。初始化程序的内容包括配置系统时钟、IO口、看门狗、ADC以及各种中断事件。中断服务程序包括矢量控制算法中的PWM定时器中断,A/D中断以及各种异常中断等组成。主程序流程图如图6:
5、结束语
本文设计的永磁同步电机数字式伺服系统,通过实验数据表明,三相电流的波形输出平稳,具有较高的精度。说明该方案可行,系统安全可靠,能满足工业生产中对电机控制的要求。
参考文献:
[1]张从鹏,刑庆辉.基于ARM Cortex-M4的永磁无刷直流调速系统设计[J].微特电机,2016(44):91-92.
[2]沈耀.基ARM Cortex-M4的PMSM驱动器研制[D].杭州电子科技大学,2014:56..
[3]陈荣.永磁同步电机控制系统[M].北京:中国水利水电出版社,2009:44-48.
[4]凌钢.基于DSP+FPGA的永磁同步电机伺服驱动器研究[D].安徽工程大学,2010:2-3.
[5]张杰.基于SVPWM控制的无刷直流电机的建模与仿真[J].机电工程,天2013,30(9):1106-1108..
附:
作者简介:
贾冕茜(1984-),女,汉族,安徽合肥人,讲师,硕士,主要从事检测技术与自动化装置教学与科研工作。
论文作者:贾冕茜
论文发表刊物:《电力设备》2017年第17期
论文发表时间:2017/10/18
标签:永磁论文; 控制系统论文; 电路论文; 电机论文; 电流论文; 同步电机论文; 系统论文; 《电力设备》2017年第17期论文;