(临沂沂堂中学,山东 临沂 276000)
摘要:本文设计的一种滞留式无人机飞行监视平台,凭借这优异的飞行性能可以通过无人机上方的闭合锁紧装置,将无人机进行定点滞留进行执行某些特定任务,并在关闭动力的情况下长时间停留在滞留点上进行拍摄或监视,比一般的航拍无人机续航更长,更稳定,还能大大降低电力能源的消耗从而做到低能耗,长续航的高效率空中监视平台。
关键词:无人机;无人机续航;高空侦查
1 研制背景及意义
现有的航拍无人机,如果想实现定点拍摄或者监控,就必须一直在空中悬停,但是无人机最大的致命缺陷就是续航问题,而且噪音还很大,这样就很难进行定点监控拍摄,给执行某些特定任务带来不便。
2 硬件配置说明
一、云端滞留式无人飞行器监视平台
①“云端”滞留式无人飞行器监视平台采用SK500机架是一款专为飞行负载而设计的四轴机架,机臂硬度高每根机臂内置整条碳纤棒加强设计,机臂借鉴了DJI S800 EVO力学设计,并优化了飞行性能和构造,上反角机臂设计增加了飞行的稳定性的同时,最大限度减轻动力的效率损耗。脚架采用18MM管径的3K纯碳纤管重约100克,产品规格:轴距:485mm,最大支持12寸螺旋桨。

②动力系统采用格式4200HA 40C动力电池,最大放电电流可达到168A电流足以满足飞行平台的用电需求,电调采用目前主流好盈40A系列,最大瞬间电流可达到60A电流可以给飞行平台提供充足的动力输出,电机采用主流郎宇 X系列2216,880KV无刷电机配合4S动力电池和40A无刷电调搭配ATG10寸加强版螺旋桨,单轴最大拉力可达900G,保证能为整机提供足够大的拉力。
③“云端”滞留式无人飞行器监视平台飞控系统配备大疆NAZA飞控系列的最新一代产品N3飞控,大疆NAZA N3多旋翼飞控系统采用大疆最先进的控制导航算法,内置两套IMU冗余设计,可实现飞行数据实时互为备份,结合全新设计的内减震结构设计,赋予“云端”滞留式无人飞行器监视平台高可靠性飞行性能;大疆“黑匣子”数据记录系统为飞行性能分析提供精准的数据支持,同时高性能软件SDK和A3 Upgrade Kit高性能导航模块的支持,可帮助“云端”滞留式无人飞行器监视平台实现丰富的应用扩展,为无人机行业应用探索者提供稳定而全面的系统级解决方案。
④“云端”滞留式无人飞行器监视平台遥控系统采用国产12通道遥控器,采用混合双扩频技术,抗干扰性能更强,3毫秒极速响应速度,空中遥控距离达到1500米,全功能全机型系统,为后续升级留下丰富拓展接口和空间。
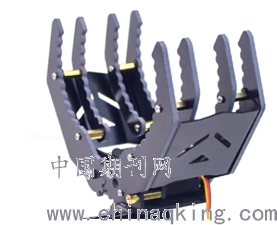
⑤“云端”滞留式无人飞行器监视平台,闭合锁紧装置采用4自由度仿人手设计,材料使用3K纯炭纤维板材CNC雕刻而成,闭合锁紧装置执行部分,采用机器人专用大扭矩数字舵机最大可以达到60KG抓取力,机械手臂开合可达120MM。
⑥“云端”滞留式无人飞行器监视平台视频监控系统双光热成像相机,热成像与4K可见光结合,随时提供关键信息,帮助用户掌握先机,将感知能力与作业效率提升全新高度。双光热成像相机可同时录制传输热成像与可见光影像,双光热成像相机与“云端”滞留式无人飞行器监视平台无缝结合
“云端”滞留式无人飞行器监视平台的安装过程
①组装SK500飞行平台②飞行平台动力系统的安装③飞行控制系统的安装④飞行平台的线路连接⑤飞行控制系统的调试⑥闭合锁紧装置的组装⑦闭合锁紧装置的调试
后期改进计划
“云端”滞留式无人飞行器监视平台后期将采用8轴可折叠飞行平台设计延续SK500设计高负载和优秀的飞行性能,将采用模块化设计,进一步提升了可靠性,使用更便捷,升级三套冗余飞控设计配置高精度D-RTK GNSS大幅度提高飞行可靠性,有效的消除飞行干扰,并提供厘米级的高精度定位,采用高清数字图传系统,使用飞行智能电池和智能电池管理系统,可独立管理任何一块智能电池,在不关机的情况下支持热插拔智能电池,实现超长续航的同时还能解决传统大容量电池方案使用及维护复杂、安全性低和难以携带的问题。支持更多第三方软硬件扩展为无人机行业应用提供可靠度飞行平台。
参考文献
[1]贾恒旦 郭彪 无人机技术概论 [M].机械工业出版社,2018:78-117.
[2]符长青 曹兵 多旋翼无人机技术基础[M].清华大学出版社:2018:256-260
[3]权军 无人机操控师 [M].中国劳动社会保障出版社2018:132-184
作者简介:李凤英(1965.03-),女,职称:一级教师,研究方向:科技创新。
论文作者:李凤英 李玉伟
论文发表刊物:《知识-力量》2019年6月上
论文发表时间:2019/3/5
标签:无人机论文; 飞行器论文; 平台论文; 云端论文; 系统论文; 性能论文; 光热论文; 《知识-力量》2019年6月上论文;