摘要:低空无人机航空摄影测量技术作为一种新兴的测量技术,逐渐发展成为基础地理信息采集的重要手段。该文结合工程实践对该技术的特点在大比例尺地形图测绘中的应用进行研究分析。
关键词:无人机航空摄影;1:500大比例尺测绘;精度验证
1引言
无人机(Unmanned Aerial Vehicles,UAV)航空摄影测量技术是继计算机技术、数字通讯技术以及3S技术等发展起来的一项新兴的测量技术,具有高时效、高分辨率、机动灵活、成果内容丰富等诸多优点,在现代测绘行业中发挥着越来越重要的作用。从技术发展角度上而言,它属于大飞机航空摄影测量及卫星遥感测量的有效补充,因此在地形图测绘中具有广泛的应用价值。
2低空无人机摄影测量技术概述
2.1定义
无人机是一种由动力驱动、利用无线电遥控设备和自备的程序控制装置操纵的不载人,可重复使用的航空器。而无人机航摄系统就是以无人机为飞行平台、以影像传感器为任务设备的航空遥感影像获取系统。
2.2组成
低空无人航测系统主要包括无人机航飞硬件系统和数字处理软件系统两部分。硬件系统包括无人机飞行平台、传感器(数码相机)、飞控系统、地面监控系统。地面配套设备主要有遥控设备,信息接收和信息处理终端。软件系统主要包括外业控制软件和数据后处理软件。外业控制软件主要用于飞行任务的设计、规划、控制及飞行效果检查。数据后处理软件主要用于原始数据的处理分析、成果生产。
2.3特点
相对于传统的航空航天遥感测量技术,低空无人机航空摄影测量技术具有以下几方面的优势:①传感器为普通数码相机,作业成本低;②无需空域申请,作业灵活;③云下摄影,能够获取大比例尺高精度、高清晰影像,在局部信息获取方面具备明显的优势; ④ 影像重叠度高,有利于提高后续处理的可靠性。因此低空无人机航空摄影测量在地形图测绘与更新、土地利用调查、城市规划与市政建设、国土监察、应急救灾等领域具有广泛的应用前景。
2.4无人机航摄产品类型
低空无人机摄影测量成果一般包括“4D”产品,即数字线化地形图(DLG)、数字正射影像图(DOM)、数字高程模型(DEM)、数字栅格地图(DRG)及数字表面模型(含实景三维模型)(DSM)。
3无人机航空摄影测量在大比例尺地形测绘中的应用实践
3.1项目概况
为开展某国有地块收储及场地平整工作,拟获取地块内1:500现状地形图及正射影像图,为土方计算、征地拆迁提供基础数据。场区位于广东省广州市东北部,测区面积约3.0 ,地貌以平地丘陵为主,海拔最高约50 ,最低25 ,比高较低;丘陵一般为经济林地和果园,平地主要为菜地或草地;测区北部分布有一个小村庄,但建筑密度不高,建筑层数较低,场地总体情况较利于航飞工作开展。
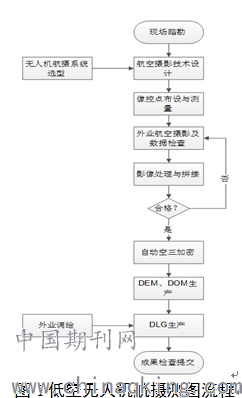
3.2 作业流程
本工程无人机航飞作业流程见图1。
3.3外业实施
3.3.1无人机选型
从技术要求、场地条件及经济性等方面综合考虑,本工程采用瑞士e-Bee无人机飞行平台,航摄仪采用Sony Wx350静态35mm焦距摄像机,像素1820万,续航时间高达45 ,单架次航摄面积高达10 。
3.3.2像控点布设与测量
像控点的布设采用非全野外布点法,考虑到实际精度要求较高,无人机像控点布设密度满足以下要求:①符合规范CH/Z3004-2010相关要求;②旁向相邻平高控制点基线间隔数≤4;③航向相邻平面控制点的基线跨度≤4;④布设的像控点能有效控制成图范围。
本工程像控点全部为平高控制点,共布设像控点56个,其中8个为检查点。平面采用广州市连续运行卫星定位城市测量综合服务系统(GZCORS)按一级GNSS-RTK技术要求进行测量,高程采用附合四等水准线路联测已知水准点。
3.3.3航飞外业实施
根据1:500地形图成图要求及场区地形地貌情况,本工程设计航高140 ,地面分辨率0.04 ,航向重叠度为80%,旁向重叠度为 65 %,旋偏角≤8%,像片倾斜角≤5%,航道弯曲度<3%。利用自带飞控管理软件进行自动航线设计,共布设航线61条,航摄面积约3.0 。
外业航飞选择天气晴朗、能见度较高、风力较小、气流平稳的时段进行。本工程分两个架次飞行,共获得航片总数1240张,获取的影像清晰度好,照片色彩均匀,饱和度良好,能够真实地表达地物信息。
3.3.4空中三角测量
本工程外业航拍时设置的影像重叠度较大,内业空三测量时,每个地面点对应的像点观测值较多,大量的多余观测有利于观测值的粗差探测和剔除。工程采用专业的无人机数据和航空影像处理软件Pix4Dmapper进行自动空三加密测量。软件处理过程如下:同名像点的自动匹配、量测控制点、增加像点、光束法自动平差计算、删除或编辑粗差像点,必要时重复第四、第五步,直至输出合格的加密成果。
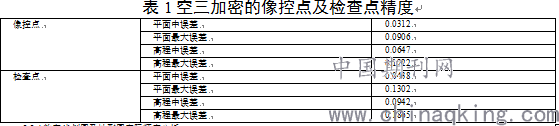
区域网平差的精度通过像控点及检查点进行评定,根据解算出的外方位元素和对应的像点坐标,求出像控点及检查点的加密坐标值,计算与实测坐标值的差值,结果见表1。
3.3.4数字线划图及地形图实际精度分析
数字线划图制作基于空三加密成果进行,采用航天远景Mapmatrix 软件通过立体影像模型对地形要素进行判读和数据采集,地形要素分点、线、面和注记四类实体,采集的数据分层分类保存。立体测图完成后,将数据导入专业成图软件CASS9.0按国标图式进行数据的整理及编绘成图,同时对立体测图阶段判读有疑问及无法判读的要素进行外业补充调绘,最终对图面进行完善,获得DLG成果。
地形图成图精度检查分平面精度检查和高程精度检查两类进行,检查点坐标采用全站仪野外实测法采集。平面检查点主要选取房角点、道路拐角点、铺装地面拐角点等典型的地物点,高程检查点主要包括部分平面检查点及路面、铺装地面、空旷的平地等。以实测检查点坐标为真实坐标,比较二者的较差及较差中误差作为平面和高程精度的评判标准。
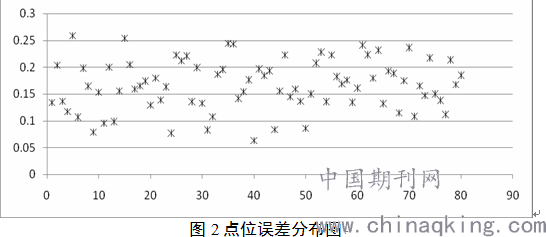
本工程实际抽取平面检查点82个,高程检查点75个,检测精度统计结果如下:
平面精度统计结果:方向最大误差为-0.198;方向最大误差为0.200;点位中误差为±0.172,最大误差为0.258。平面点位误差分布图见图2。
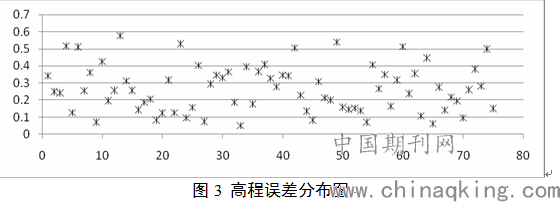
高程精度统计结果:高程中误差为0.299,最大误差为0.575。高程点位误差分布图见图3。
根据规范《基础地理信息数字成果 1:500、1:1000 和 1:2000 数字线化图》(CHT 9008.1-2010)规定的相关精度要求“1:500平原地区数字线化图平面精度要求为0.3m,高程精度要求为0.2m”,可见本次航测DLG成果平面能够满足 1:500比例尺的精度要求,但高程无法满足1:500比例尺的精度要求。
4结语
通过本次无人机航测项目的实施,验证了低空无人机航测系统用于 1∶500 地形图生产的可行性。通过选择合理的航摄平台和数据处理软件,进行科学的技术设计,其生产的1:500线划图(DLG)成果能满足平面精度要求,但高程只满足1:2000地形图精度要求,能否达到1:500的精度要求有待进一步实验验证。随着高精度惯导设备、无人机飞行平台等硬件设备的发展和航测数据处理算法的改进,低空无人机航空摄影测量的精度必将进一步提高,凭借其其机动、灵活、作业成本低、效率高等优势,在大比例尺地形图测绘中的应用必然将更加广泛。
参考文献
[1]徐生望.无人机测量技术在地形测量方面应用前景探究[J].建筑知识,2016,(01):284.
[2]张颖秋.无人机航空摄影测量在地形图测绘中的应用[J].中国非金属矿工业导刊,2015,(05):59-62.
[3]桂新,祝红英.浅析无人机航空摄影测量系统及应用[J].江西测绘,2015,(02):2-37.
[4]支卫斌.无人机航空摄影测量在地形测绘中的应用[J].江西建材,2015,(08):224-225.
论文作者:尹啸
论文发表刊物:《基层建设》2017年第24期
论文发表时间:2017/11/16
标签:无人机论文; 测量论文; 精度论文; 高程论文; 地形图论文; 检查点论文; 比例尺论文; 《基层建设》2017年第24期论文;